Case 1: Modulated signals with pulse or pattern repetition times ≤ 1 ms (PRF ≥ 1 kHz)
If you obtain a steady power reading of a modulated signal (no significant fluctuations of the displayed power) with no averaging, then it is likely that the pulse or pattern repetition rate is greater than 1 kHz. In this case, most of the averaging of the envelope power is performed in the front end of the sensor (before being digitized). When this is the case, the MA24106A will provide an accurate indication of the average power with no special considerations.
Case 2: Modulated signals with pulse or pattern repetition times between 1 ms and 50 ms (100 Hz < PRF < 1 kHz)
In this case, the signal is varying too slowly to be averaged in the front end of the sensor, so averaging must be performed after digitalization by increasing the averaging number in the power meter application (or calculating the average of several measurements if controlling the sensor over the bus). A large amount of averaging must be used for some pulse/pattern repetition frequencies to get a steady reading. If Low Aperture Time (LAT) mode is selected, the maximum recommended pulse repetition time is about 10 ms. If High Aperture Time (HAT) mode is selected, signals with pulse repetition periods as long as 50 ms can usually be measured.
Case 3: Modulated signals with pulse or pattern repetition times greater than 50 ms
In this case, it can be difficult to get an accurate average power reading even by averaging many readings. The sample rate of the sensor and the pulse repetition rate of the signal may be close enough that they can “beat” together resulting in low frequency modulation of the power indication. If averages are not calculated over many of these beats, or an integer number of beats, errors can result. This is not unique to the MA24106A and can be an issue with any power sensor/meter and any sampled data system.
High Crest Factor Signals (peak to average ratio)
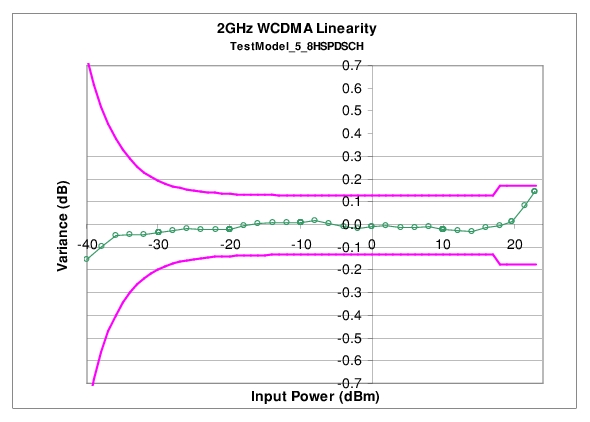
High crest factor signals such as PAPR as high as 10dB. To ensure the most accurate power measurement, the average power of the signal should not exceed +20dBm. For example the peak power of the signal should not exceed +30dBm if its PAPR is 10dB. A sensor’s linearity graph of a WCDMA (TestModel_5_8HSPDSCH) signal with PAPR of 10 dB is shown below:
Sensor Linearity Graph
Multitone Signals
The MA24106A is a True-RMS sensor that can measure very wide bandwidth modulation without much restriction. The only limitation is the frequency flatness of the sensor. Because the sensor’s sensitivity is not identical for all frequencies and when measuring multitone signals, the frequency entered into the sensor’s application should be the average frequency of all significant tones. The MA24106A has an error of 0.01 dB for every 100 MHz bandwidth at frequencies below 3 GHz, and an error of 0.03 dB for every 100 MHz bandwidth at frequencies above 3 GHz.
For example, a dual tone signal of 2.0 GHz and 2.2 GHz may have an additional measurement error of 0.02 dB (0.01 dB × 2) when the application frequency is set to 2.1 GHz.
Noise and Averaging
To achieve a required reading resolution, particularly at low power levels, averaging is often needed to reduce noise and steady the displayed power reading. Use the noise vs. resolution table in Table: MA24106A Averaging Table (Low Aperture Time, Default Mode) and Table: MA24106A Averaging Table (High Aperture Time) to determine the number of averages that will typically be required for a given resolution. Alternatively, determine the number of averages through calculation by using the noise specifications and the fact that noise will be proportional to the square root of N, where N is the number of averages.
For example, a CW tone at –30 dBm is to be measured to 0.01 dB resolution. Using the table in the sensor manual, the required number of averages is 38 averages using High Aperture Time mode (the same measurement would require more than 256 averages in Low Aperture Time mode).
Settling Time
The MA24106A samples power continuously every 70 ms in the Low Aperture Time (LAT) mode and 700 ms in the High Aperture Time (HAT) mode. The sensor’s front end and digitizer settles completely to a step change in power in this amount of time. However, there is no way to synchronize the sensor’s sampling to any other event, such as a power step or bus request for a measurement. Therefore, the first measurement requested from the sensor after a power step may not be fully settled. To ensure a fully settled measurement when operating the sensor over the bus, wait 70 ms (700 ms if in HAT) after a power step before requesting the measurement from the sensor. Alternatively, request two measurements from the sensor and discard the first.
If averaging is required as described above, settling time increases by N × sample period, where N is the number of averages and the sample period is the time is milliseconds. The measurement sample period is 70 ms for LAT and 700 ms for HAT. When operating the sensor over the bus, request N+1 measurements from the sensor, discard the first, and then average the subsequent readings. The settling time is approximately (N+1) × sample period.