When measuring the average power of a time varying or modulated signal with a modulation bandwidth (BW) which is much greater than the signal channel of the sensor, averaging of the power is performed in the sensor hardware (detectors and or preamplifiers). For the case of the MA243x0A the signal channel BW is 50 kHz. Signals modulated at MHz rates will be averaged in the hardware and no special considerations are required.
When measuring signals with modulation frequency components near or below the signal channel bandwidth, average power readings may be seen to fluctuate over time. This fluctuation may be reduced through careful selection of the aperture time and averaging number. Ideally, the aperture time should be chosen to be an integer multiple of the modulation frequency. If this can be done, then the average power reading will be stable for each measurement update. For modulations with multiple frequencies present, or with significant modulation components with periods longer than the maximum aperture time (1 sec for MA243x0A) averaging will have to be increased to obtain a stable reading. If the measurement update rate is very close to the period of the modulation, a low frequency “beat note” can result. If the frequencies are very close, the beat note can be very low in frequency, and therefore require very long averaging times to remove. In this case it is suggested that the aperture time be changed to result in a higher frequency beat which is easier to average out.
Settling Time
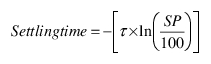
The signal channel bandwidth of the MA243x0A series power sensor supports a rise time of about 8 µs. The ADC sample period is approximately 7.14 µs. Thus it will take more than one ADC sample for the signal channel hardware to completely settle in response to a step change in input power. The hardware settling time for the MA243x0A series power sensor can be estimated by assuming a single pole response with 50 kHz bandwidth:
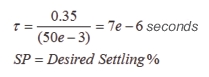
where:
For small settling percentages, it is quite likely that the noise per ADC sample will be larger than the desired settling percentage, thus averaging or decimation of ADC samples will have to be used to reduce the noise. Averaging will, of course, increase the settling time of the measurement in direct proportion to the averaging number used.
It is important to note that the settling time described above strictly applies only to increasing power steps (rise time). Settling to decreasing power steps is typically slower. For settling decreasing power steps to 1 % or 0.1 %, the settling will typically be within a factor of 2 or 3 of the calculation above. Settling to 0.01 % or less may take considerably longer.
Noise and Time Resolution in Scope Mode
In Scope mode (and in all other modes), the MA243x0A is sampling at full speed, which is approximately once every 7 µs. When the period chosen for Scope mode exceeds the number of data points times this period, then multiple ADC samples are averaged to form each data point. Therefore there is a trade-off between time resolution (many data points) and trace noise. To minimize trace noise, choose less data points. Of course for recurrent waveforms, trace averaging can always be used to reduce trace noise if a large number of points is desired. This would however tend to increase the over-all measurement time.
Optimizing Internal Triggering
Sometimes it can be difficult to obtain consistent triggering in Scope mode. Here are some points to consider when choosing triggering parameters:
• It is more difficult to trigger on signals which are slowly varying with time. Noise in the signal channel can result in false triggers. In this case, try setting the trigger level at powers away from the bottoms of the measurement ranges. The range crossover power for the MA243x0A is 0 dBm nominal between MP and HP and 20 dBm nominal between LP and MP. Thus it can be advantageous to avoid setting the trigger at powers just above +2 dBm, and powers just above –18 dBm where the trigger signal is noisy.
• Modulated signals can appear “noisy” and also result in false triggers. In this case, adjusting the trigger level may not help. Sometimes there may be a portion of the signal with less modulation, or less “noise-like” modulation which can be triggered on with more success. Try using a different trigger point and adjusting the trigger delay to shift the waveform in time to see the desired section.
• False triggers due to either noise or noise-like modulation can be reduced by increasing the trigger noise immunity parameter and invoking hysteresis for the MA243x0A. Using noise immunity will result in a slight positive trigger delay, but this can be made up for by introducing a negative trigger delay with the trigger delay parameter.
• The trigger settings should always be optimized before trace averaging is applied. If trace averaging is used when the trigger is not stabilized, the displayed waveform will not be an accurate representation of the signal. First optimize the trigger, then apply trace averaging.
Noise Floor in Scope Mode
The noise level or “floor” displayed in Scope mode in PowerXpert when using low averaging may seem to be higher than what would be expected. This is due to the way noise is dealt with when converting power into dBm for display. With no input power, the values of the ADC samples vary about some value which corresponds to zero power. Ideally there are equal number of samples above and below this value. The samples which are below this value correspond to “negative” power. This is non-physical, and does not truly mean there is negative power flow to the sensor, it is simply a by product of noise in the signal channel. If these samples are displayed in linear power units such as mW, then the noise floor will be as expected. However there is a problem when converting to logarithmic units such as dB. Because taking the logarithm of negative numbers is not generally allowed, the absolute value of the samples is usually taken before taking the logarithm. This has the drawback of increasing the average value of the samples, artificially increasing the apparent noise floor. When the averaging is increased, the noise floor will go down. The apparent noise floor can be estimated using:
NF = 0.8 x noise
where:
NF = the average linear power or noise floor due to taking absolute value of power samples
noise = the noise power in linear units on a 1 sigma basis