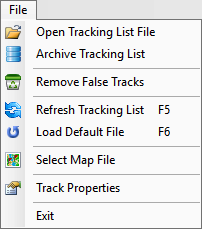
Open a tracking list file. By default, the tracking files are saved in: Local Disk (C:) > Users > Documents > Anritsu > Tracking.anr.
Archive Tracking List:
Stores a tracking list to an archive file location with the current date. If the list of tracking events gets too long, store the list in an archive folder. When this is done, the tracking events window is emptied into the archive file location. The tracking window is now ready to display the next tracking events file.
Remove False Tracks
Removes the yellow and red entries that represent the non-drone signals from the list. To restore those entries, press F5 to reload the tracks.
Refresh Tracking List
When using track viewer while AeroShield is running, new tracks will be written to the file. but will not automatically show up in the list. The list is only generated when you open a file. Refresh causes Track Viewer to re-read the tracking file so that any additions are included.
Load Default File
When using the Archive Tracking List menu, the user can make a copy of the current tracking list. This empties the default list. To view tracks that have been archived, use the Open Tracking List File menu to navigate to and open an archived file. After looking at tracks in an archive, the user may want to return to the default track file. This is always the file that AeroShield writes new tracks to. To open the default file, the Load Default File is a fast menu option to open it, rather than have to use the Open Tracking List File menu to navigate to the default file.
Select Map File
Open a map file to view tracking events. See Open a Map File.
The Track Properties data sheet provides the following information as shown in Figure: Track Properties.
Track Properties
#
Displays the sequential number of the tracking events that have been logged.
GPS Coordinates
Displays the Latitude and Longitude of the drones signal’s tracking point location.
Segment – Distance
The velocity traveled (meters/sec) from the previous tracked point.
Segment – Time
The capture time between each sequential tracking event.
Segment – Speed
Flight velocity (meters/sec) between each sequential tracking point.
Total Flight – Distance
Total flight distance (meters) accrued of each sequential track point occurrence for each tracking event.
Total Flight – Time
The capture time accrued between each sequential tracking point.
Total Flight – Speed
Total Flight Distance divided by the Total Flight Time result (meters/sec).
Motion Detection
The values displayed range from 0 to 1. A value of 0 indicates the track points are completely random and are unlikely a drone. A value of 1 indicates a very high correlation in the track point positions and indicates the strong probability of a drone signal.